This page is a short version of a paper published in Journal of Atmospheric and Oceanic Technology which is available here.
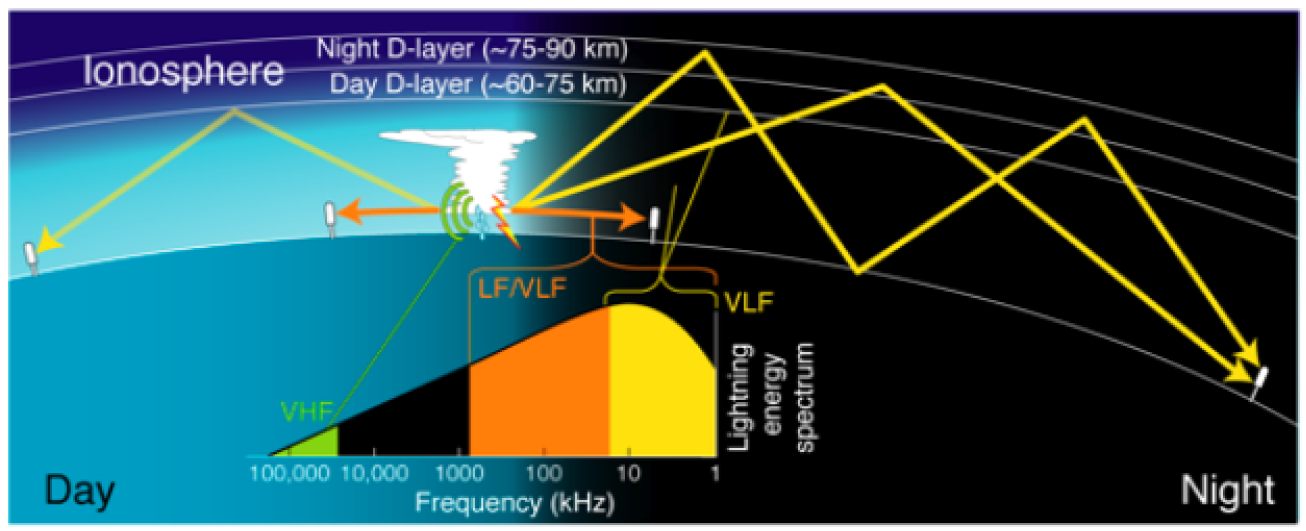
The waveguide between the Earth's surface and the ionosphere allows very low frequency (VLF) emissions generated by lightning, called sferics, to propagate over long distances (Fig. 1). The new Pacific Lightning Detection Network (PacNet), as a part of a larger long-range lightning detection network (LLDN), utilizes this attribute to monitor lightning activity over the central North Pacific Ocean with a network of ground-based lightning detectors that have been installed on widely spaced Pacific islands. PacNet and LLDN sensors combine both magnetic direction finding (MDF) and time-of-arrival (TOA) based technology to locate a strike with as few as two sensors. As a result, PacNet/LLDN is one of the few observing systems, outside of geostationary satellites, that provide continuous real-time data concerning convective storms throughout a synoptic-scale area over the open ocean.
Figure 1. Schematic diagram of the Earth-ionosphere wave guide, which allows VLF (3-30 kHz) emissions from thunderstorms (sferics) to propagate thousands of kilometers through reflection. The best propagation is observed over the ocean at night.
The ionospherically reflected signals have different waveforms than typical ground waves produced by CG lightning return strokes (Fig. 2). Note the sharp initial downward peak and short peak-to-zero time for the ground wave at 264 km (Fig. 2a). At a distance of 860 km, Fig. 2b shows a distinct initial downward ground wave followed by a single-hop ionospheric reflection of opposite polarity (Kelso 1964). At a distance of 3400 km (Fig. 2c), the waveform is determined by multiple ionospheric components, but there is evidence of a very small initial downward ground wave, a slightly larger first-hop (inverted) sky wave (at ~500 µs), and a larger downward second-hop sky wave (at ~520 µs). Although this distant signal contains clear sky-hop components, its overall waveform would be best-described using mode theory (Wait 1996). Since the field produced by a return stroke generally changes polarity at each reflection, the original polarity of the reflected waves cannot be readily determined, unless the ground wave is clearly identifiable.
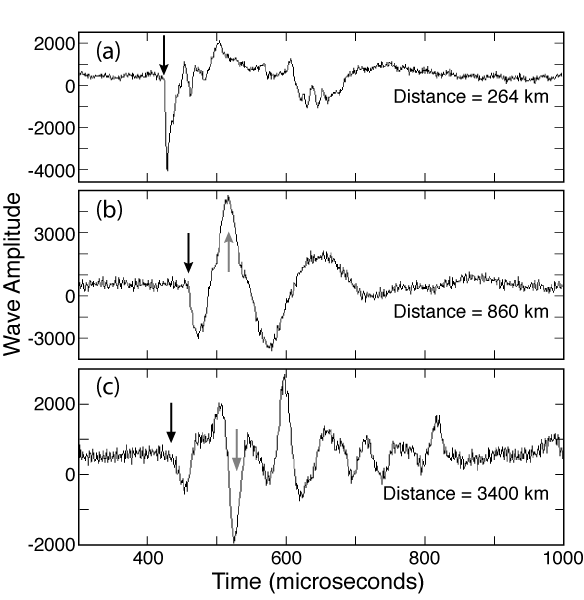
Figure 2. Vertical electric field waveforms for three different negative cloud-to-ground return strokes detected by sensors located at 264, 860, and 3400 km from the lightning stroke. The amplitude scale is uncalibrated. Black arrows indicate initial appearance of the ground wave and the gray arrows in b) and c) indicate the first-hop and second-hop reflected waves, respectively.
Back to topVLF sensors have been installed on several islands in the North Pacific Ocean (Figure 3). PacNet sensors are modified IMPACT ESP (Improved Accuracy from Combined Technology, Enhanced Sensitivity and Performance) sensors designed for long-range detection (Figure 4). The gain has been set to a high level in order to receive weak, ionospherically reflected sferics, and the bandwidth has been adjusted to have greatest sensitivity in the VLF band. The sensors use combined technology that employs both time-of-arrival and magnetic direction finding methods in the data processing (Cummins et al. 1998b).
These Pacific sensors work in combination with other Vaisala Long Range Lightning Detection Network (LLDN) sensors, which consists of National Lightning Detection Network (NLDN) and Canadian Lightning Detection Network (CLDN) sensors located throughout the U.S. and Canada. The ~200 broadband LF/VLF sensors in these networks are not optimized for long-range detection, but still provide important contributions to the overall network performance. The resulting long-range network, hereafter called PacNet/LLDN, continuously monitors lightning activity associated with convective storms across the Pacific Ocean, north of the equator.
Although PacNet sensors are specifically designed for long-range detection, the concept of this long-range lightning detection network is broader than just these sensors, since the processing algorithm also incorporates sensor data from conventional sensors. The long-range location-processing algorithm identifies and accepts sensor data produced by both ground-propagated waves and ionospheric reflections that are rejected by the short-range algorithm used in NLDN and CLDN.
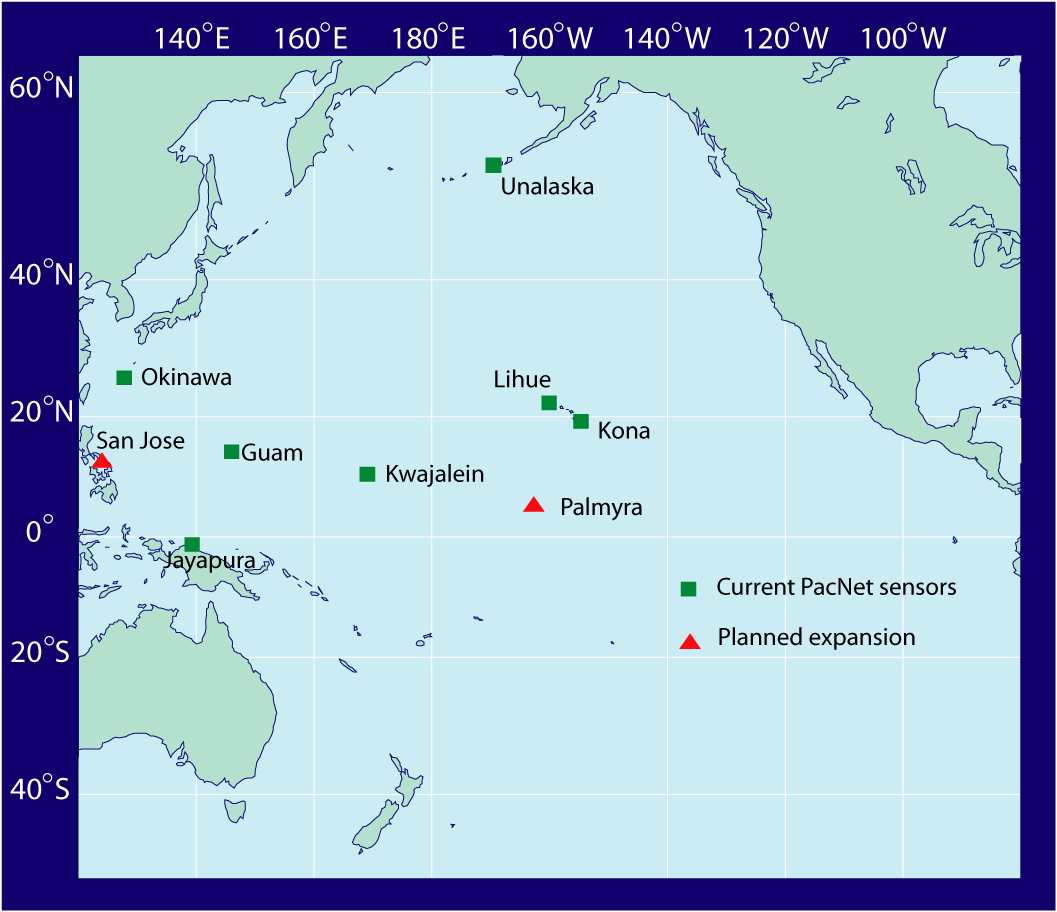
Figure 3. PacNet/LLDN sensor sites




Figure 4. PacNet/LLDN sensors
Long-range propagation of sferics involves a complex interaction between the earth and the ionosphere. The behavior of this propagation medium varies with time-of-day, conductivity of the earth path, and (to a lesser degree) season and direction. Since we are primarily interested in a "first order" characterization of propagation over salt water, it is reasonable to simply partition propagation into two conditions: day and night. It has been shown that propagation characteristics between two widely separated locations (both attenuation and phase changes as a function of frequency) transition fairly continuously from the daytime behavior to the nighttime behavior, over a period of 2-3 hours.
The propagation characteristic that directly affects peak signal strength is the amplitude attenuation as a function of frequency and distance. This can be approximated by an attenuation function which is a dimensionless scaling function. The space constant or e-folding distance (the distance at which propagation losses reach 1/e) is primarily dependent on the conductivity of the earth-portion of the path and the electron density profile in the atmosphere. This expression is a simplification of the general propagation models described by Wait (1968) and others, but empirical evidence suggests it captures the average behavior of broadband sferics over modest propagation distances (<4,000 km).
The attenuation rate was derived by time-correlating data from the test sensor with NLDN data collected throughout the U.S., and comparing the lossless signal strength (determined by the NLDN estimated peak current and the known distance) with the peak field strength measured by the test sensor. The analysis of signal strength shows the expected exponential loss in energy with distance (Fig. 5), where the average relative field strength (filled circles) is normalized by the estimated NLDN peak current. The standard deviation error bars show larger errors in the range of 2000-3500 km, where propagation involves a mix of ground and ionospheric propagation. The daytime space constant shown in Fig. 5a is 10,000 km, and the nighttime space constant is 40,000 km (Fig. 5b).

Figure 5. Relative signal strength as a function of stroke distance as detected by a PacNet test sensor located in Tucson, Arizona for (a) day and (b) night (filled circles). The error bars are ±1 standard deviation. The solid line shows the modeled signal attenuation as predicted by the attenuation equation
The distinct separation of timing between ground-, first-hop-, and second-hop waves can be used to identify the wave type (Fig. 6). Within ~500 km of the sensor, nearly 100% of the signals are ground waves. Beyond that, the percentage of the first-hop waves increases sharply, whereas the ground wave percentage decreases. They become equal at 900-1000 km. As noted earlier, the error bars for the observations of relative signal strength with distance are greatest at distances where there is significant overlap in the wave types (compare Figures 5 and 6). The addition of a signal processing capability within the sensor hardware to distinguish between the waveforms could reduce this uncertainty in future.
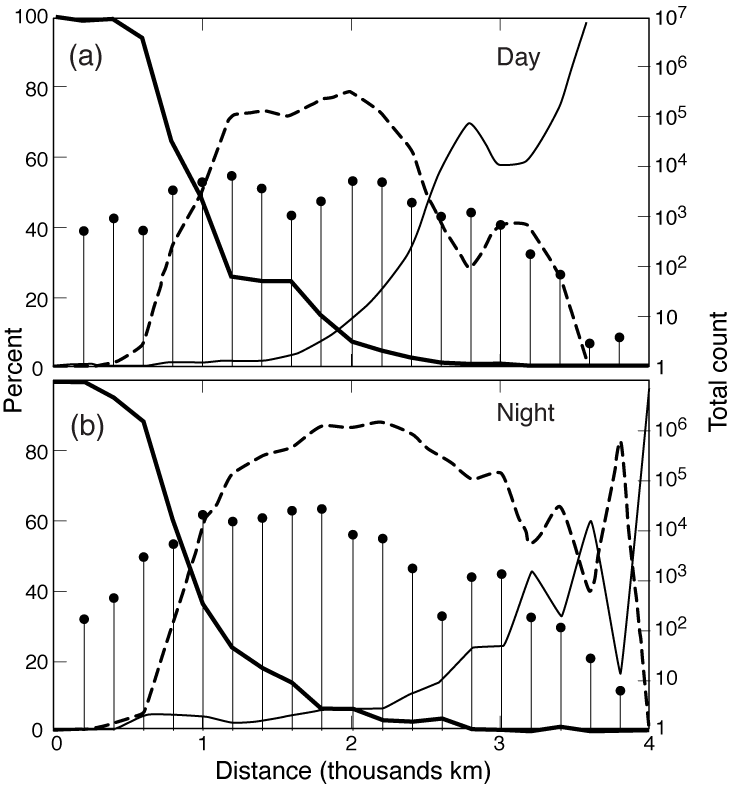
Figure 6. Percentage of different propagation types as a function of distance for (a) day and (b) night. Thick solid line is for ground wave, dashed for first-hop sky-wave, and thin solid for second-hop sky-wave. The bars indicate the total number of strikes detected in each 200 km distance bin (right ordinate).
Timing errors were calculated by time-correlating data from the PacNet test sensor with NLDN data and comparing speed-of-light propagation time (determined from the NLDN stroke time and the known propagation distance) with the arrival time measured by the sensor (Fig. 7). These histograms were obtained by measuring the arrival-time delay of PacNet sensor reports relative to NLDN estimated stroke times measured with an accuracy of approximately one microsecond. All reports from one week of observations are included in this analysis. Figs. 7a and c include reports with the same polarity as the NLDN peak current, and Figs. 7b and d include opposite-polarity reports. The polarity reversal (relative to the polarity determined by the NLDN) occurs when the earlier signal components (ground wave, then 1st-hop, then 2nd-hop) fall below the fixed detection threshold of the sensor. The ground wave signal delay distributions (average and standard deviation sigma) were nearly the same for day and night (Figs. 7a, c). The first-hop sky-wave distribution shift from daytime to night-time value can be seen in Figs. 7b and d. The second-hop distribution shift from a daytime value to night value is seen in Figs. 7a and c. Note that the polarity reversal of the first hop helps distinguish it from the ground-wave and second-hop signals, and that the signals delay distributions have almost no temporal overlap.


Figure 7.(a) Daytime ground wave signal delay distribution is centered at 20.0 µs and has a standard deviation of 5.0 µs. Second-hop sky wave distribution is centered at 90.0 µs (sigma=5.1 µs). (b) First-hop (inverted) sky-wave distribution is centered at 52.9 µs and has a standard deviation of 4.7 µs (graph inverted in reference to reversed polarity of first hop). (c) Night-time average for ground-wave distribution is 19.3 µS (sigma=4.7 µS). Second-hop wave centered at 104.0 µS, with sigma=8.0 µS. (d) First-hop distribution is centered at 70.5 µS with sigma=4.0 µS (graph inverted in reference to reversed polarity of first hop).
Angle errors were calculated by time-correlating data from the test sensor with NLDN data (150 µs time window) and comparing the true azimuth from the sensor (determined from the NLDN stroke location) with the azimuth measured by the sensor. An angle error histogram was derived from all time-correlated events with signal strengths from just above threshold to four times threshold (Fig. 8). The parametric fit has a mean value of -4 degrees (resulting from an uncorrected antenna rotation and site errors due to local site conditions), and a standard deviation of 4.5 degrees. This value is conservative since it includes polarization errors and the variation of the local site error around its mean value.

Figure 8. Angle error without site-error correction has a mean value of -4.0 degrees and a standard deviation of 4.5 degrees (for both day and night).
Propagation characteristics between two widely separated locations (both signal attenuation and phase changes as a function of frequency) transition fairly continuously from the daytime to the nighttime behavior, over a period of 2-3 hours. This fact has been confirmed through analyses of arrival-time delay and relative amplitude as functions of time-of-day for a portion of the PacNet sensor test period. For one 48-hour observation period (hours 96 through 144), all lightning was at least 900 km from the test sensor (diamond symbols in Fig. 9). The plateau in the time-delay time series (Fig. 9a) at ~50-55 µs reflects the behavior during daytime propagation when the D-layer extends lower in the ionosphere (e.g., Fig. 1). The plateau at ~70-75 µs reflects the behavior during nighttime propagation. Note the rapid and smooth transition between the two stable conditions that occurs during day-night transitions.
The PacNet "current" estimate (Fig. 9b) employed the propagation model, using an attenuation rate of 10,000 km (representative for daytime propagation). This value is typically between 0.5 and 1.0, with random variations that can be larger than the day-night variability. The extent of these random variations is correlated with the variation in propagation distance, as one would expect. Note that for the hours 132-144, when most of the lightning is in the (narrow) range of 1500-2500 km, the random variability gets rather small. We note that this is the "sweet spot" range for one-hop propagation (see Figs. 5 and 6).

Figure 9. Time-series plots of (a) the variation of arrival-time delay of VLF signals observed by the PacNet test sensor in Tucson, AZ relative to GMT time-of-occurrence of the CG stroke determined by the NLDN. Each symbol represents the median value of nine time-ordered events. (b) Peak current estimated using the PacNet sensor magnetic field peak, relative to NLDN estimated peak current. Diamonds in the lower part of each figure show the distance of the events from the sensor (right ordinate).
In addition, the behavior of PacNet DE during the transition periods between night and day over the Pacific was investigated, using the LLDN. Ground waves from flashes within 800 km of Hawaii were used as reference data. The two Hawaii sensors detected these events and the ground wave propagation was assumed to have no diurnal variation. The same events detected by distant sensors (excluding Hawaii sensors) were assumed to be sky waves, since all other sensors were more than 2400 km away. Hourly relative DE values were obtained by comparing the number of sky wave events to the number of ground-wave events near Hawaii (Fig. 10). In Fig. 10, the nighttime maximum DE begins to drop at ~0300 Hawaii local time, when the U.S. west coast sensors are in dawn. The lowest DE is reached at 0600 LT when the whole path from Hawaii to North America is in daylight. This continues until 1500 LT, when the North American sensors reach the dusk, and DE starts to enhance. The maximum DE is reached at 1800 LT when the whole propagation path is on the night side again. The relative DE during the day drops to ~20% of the night value. It should be noted that the diurnal variation shown in Fig. 10 over this test configuration area near Hawaii is close to its upper limit, as the nearest non-Hawaii sensors are >2400 km away. For quantitative applications of the PacNet data stream, such as numerical modeling, a linearly interpolated curve can be fit to the observed diurnal variation.
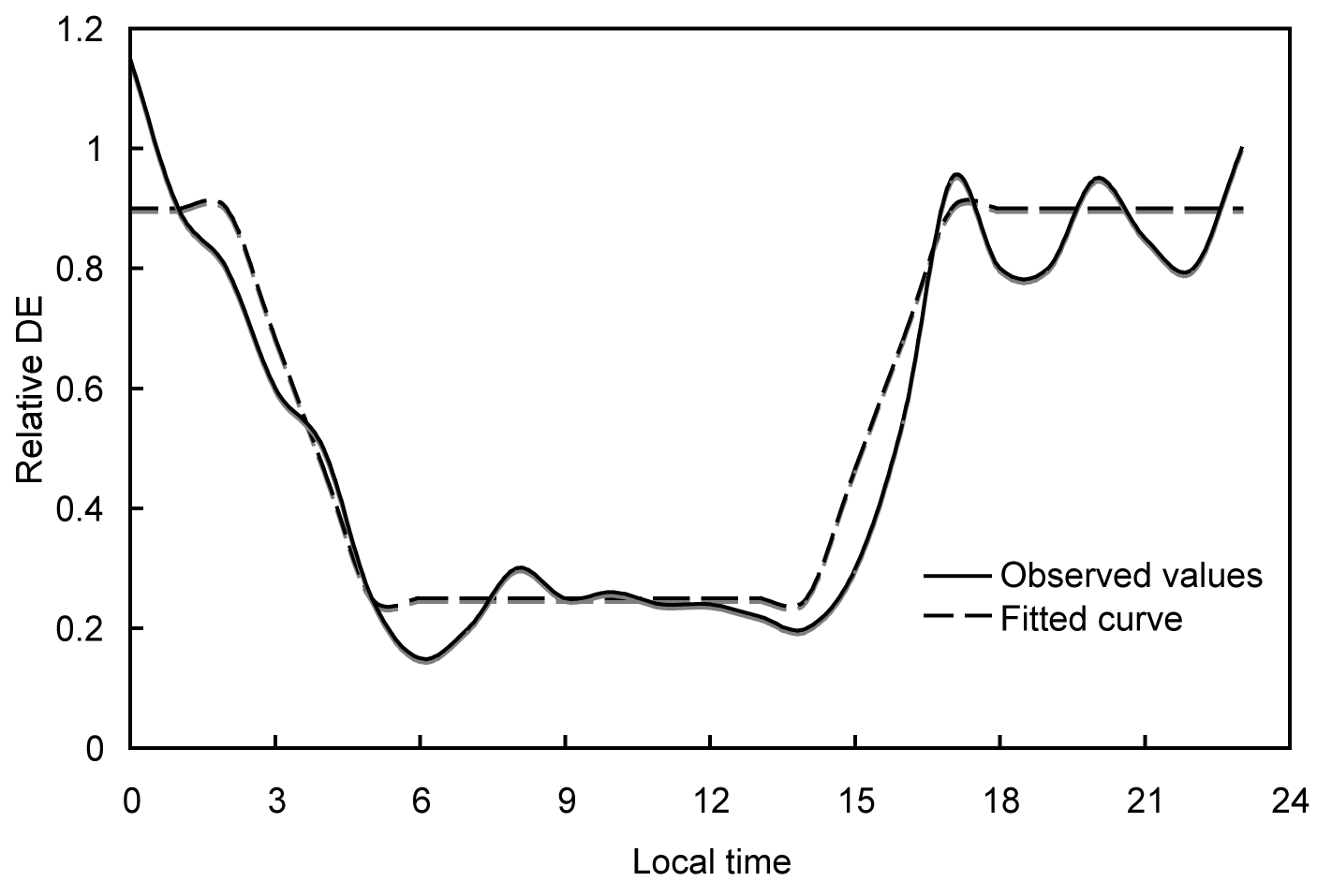
Figure 10. Empirically derived diurnal DE variation over the North Pacific (solid line) and fitted curve used for diurnal DE correction (dashed line). Since the actual DE of ground-wave events is not exactly known, the DE-scale (y-axis) is relative.
Back to topQuantitative applications require assessment of the detection efficiency (DE) and location accuracy (LA) of the network, followed by construction of an accurate model of these effects. A calibrated model of DE and LA allows these important parameters to be estimated throughout the domain of the network. There are numerous factors that determine the DE of a Lightning Location System.
The form of the propagation model was shown to be a reasonable approximation of the observations from NLDN and a PacNet test sensor located in Arizona. To estimate DE for the LLDN, the two remaining parameters (peak current distribution and propagation characteristics; i.e., space constants) were needed for salt-water path conditions. These parameters were obtained by comparing recent information produced by the LLS operated by the Puerto Rico Electric Power Authority (PREPA) with information produced by the LLDN in the western Atlantic Ocean. The PREPA network is a short-baseline network comprised of five low-gain IMPACT sensors installed in 2003. Based on analyses performed by Vaisala, this network has a CG flash DE in excess of 95% over Puerto Rico and nearby surrounding waters, and a median location error of 500 m or less. The western Atlantic portion of the LLDN operates with the same location algorithm configuration as the PacNet network in the Pacific, but this region is too distant from the PacNet sensors to derive any value from them.
It has been shown (Orville and Huffines 2001) that the median peak current value for negative first strokes, inferred from LLS measurements, are somewhat larger when a stroke impacts salt water than when it strikes ground. It is unknown whether this enhancement is the result of a change in the relationship between peak field and peak current over salt water, or an actual increase in peak current in the channel. Either way, this effect produces a change in the population of source signals over salt water that needs to be accounted for when estimating LLS DE over the oceans.
To account for this salt-water effect, the peak current distribution was constructed using negative first strokes obtained from the PREPA LLS for the calendar year 2006 (Fig. 11), obtained from the "Sea" region surrounding Puerto Rico (Fig. 12c). A PREPA CG lightning stroke was considered to be detected by the LLDN if it occurred within 350 µs of the CG stroke detected by the PREPA network.
Since LLDN DE varies as a function of day and night, CG flash and stroke DE were computed as a function of peak current for both day and night. Daytime (night-time) statistics were only computed between the hours of 12 (00) and 22 (10) UTC, when the propagation path between Puerto Rico and the LLDN sensors was all daylight (night), with no terminator crossing between Puerto Rico and LLDN sensors. LLDN DE was defined as the percentage of PREPA CG flashes (or strokes) detected by the LLDN. The observed flash DE values were 4.7% for day and 20.8% for night.

Figure 11. Cumulative peak current distribution derived from CG first strokes striking salt water near Puerto Rico.

Figure 12. Results from the detection efficiency model show (a) 5% day and (b) 20% night DE over Puerto Rico when using the reference peak-current distribution and space constants of 2000 and 6000 km for day and night, respectively. (c) Insert: Lightning data analysis region for Puerto Rico. The salt-water region is the "Sea" region, with the exclusion of the "Land" region.
The attenuation rates in the DE model were adjusted (2000-km space constant during the day and a 6000-km space constant for night) so that the predicted DE (5% day and 21% night) was consistent with the observed DE (Fig. 12), given the observed salt-water peak current distribution in the vicinity of Puerto Rico (Fig. 11). Note that these space constants are smaller than those observed for the PacNet test sensor, which reflects that lesser performance of the NLDN sensors.
The refined DE model was then applied to the PacNet/LLDN sensor distribution in the central North Pacific, with the resulting predicted DE distribution shown in Fig. 13. In applying the refined DE model to Hawaii, it is assumed that the weather regime in the two locations, in a prevailing trade-wind belt, will produce similar peak current distributions. In this regard, it should be noted that during the period of the Puerto Rico data analyzed, no tropical cyclones passed through the region studied. Later, comparison between observed and predicted DE in the vicinity of Hawaii will be presented to test the validity of this assumption.
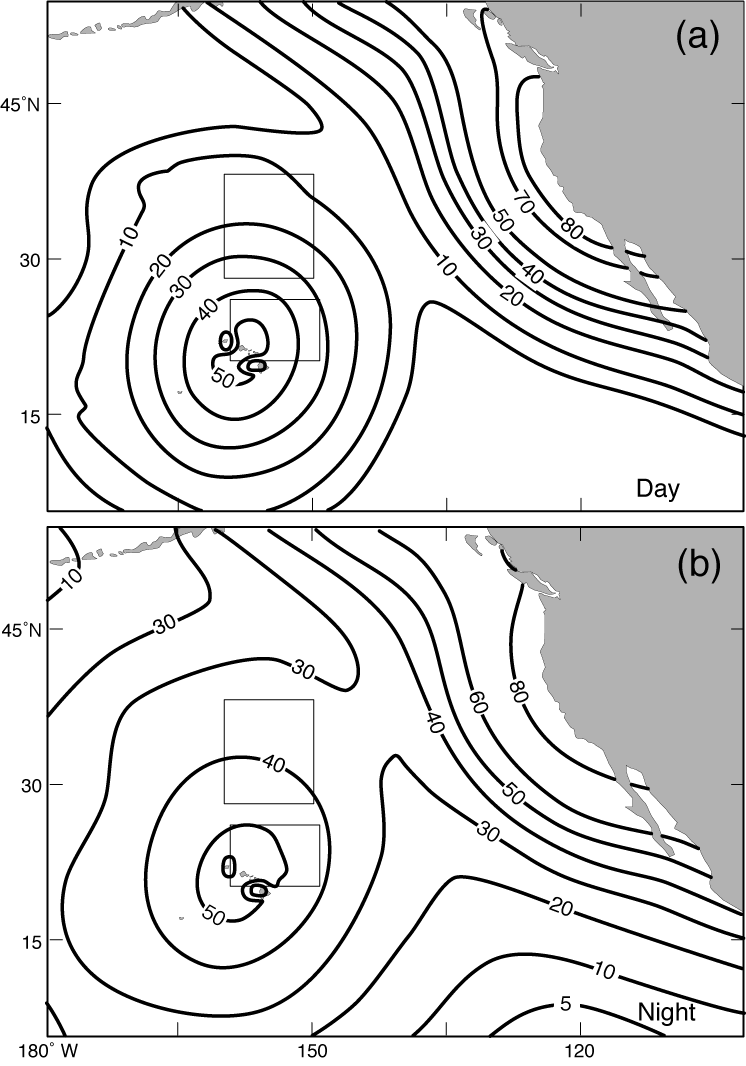
Figure 13. Modeled DE (%) over the Pacific during (a) day, and (b) night. The boxes show the areas where the observed DE was assessed. The observed values for the Hawaii region were 22% and 61% during the day and night, respectively. DE values for the central-north region were 19% and 44% for day and night, respectively.
As described by Cummins et al. (1998b, Appendix) the median estimated location accuracy is defined as the semi-major axis of a location error ellipse. For the PacNet/LLDN LA model, the ellipse is computed for each element of a 75X75 point grid, and is determined by sensor locations, probability of detection by specific groups of sensors (DE model), and the time and angle standard errors. The timing and angle error characteristics were derived empirically using the PacNet test-sensor data. The errors were parameterized as the standard deviation of a normally distributed random variable (Figs. 7 and 8), resulting in a 5-µs RMS timing error value and an angle error of 4.5 degrees RMS employed in the LA model.
The resulting modeled LA values are mostly between ~2 and 16 km between Hawaii and North America (Fig. 14). In the vicinity of Hawaii, the two Hawaiian sensors dominate the location accuracy in this DE-weighted LA model, because the detection efficiency of the other sensors outside of Hawaii is much lower over this area. Although the distant sensors contribute slightly in the vicinity of Hawaii, the two Hawaii sensors detect the majority of the events. This two-sensor "sub-network" exhibits the poorest LA near the exterior of the baseline defined by the two sensors (to the northwest and southeast), and the best LA when lines extending from the two sensors intersect at a 90-degree angle at the location of the lightning strike. In the immediate vicinity of Hawaii (northeast and southwest) the LA is relatively good, but deteriorates away from the islands, as the detection angle becomes unfavorable. Farther to the northeast of Hawaii the sensors from NALDN begin to detect flashes and the LA improves. The Kwajalein sensor improves the LA slightly to the southwest of Hawaii. Areas of the poorest LA occur to the southeast of Hawaii, near the extension of the baseline between the two Hawaii sensors. Furthermore, there are no additional sensors in that direction, nor does the area get any contribution from the other sensors, due to both the lower gain of the NALDN sensors and the applied hard limit of the detection distance in the LA model (5000 km). To the northwest of Hawaii, Unalaska and Kwajalein improve the LA slightly, but the Hawaii sensors still dominate in the LA performance.
It should be noted that the LA and DE have improved recently, specifically over the western parts of the domain, because of the added sensors in the West Pacific.
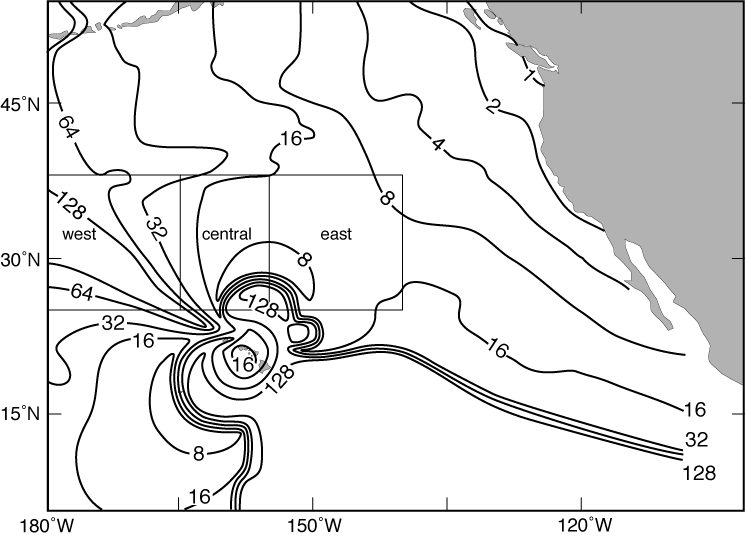
Figure 14. Modeled LA (km) of PacNet/LLDN with four PacNet sensors located in Unalaska, Kwajalein, Lihue, and Kona (+ LLDN). The boxes show the areas where the observed LA was assessed.
The performance of PacNet/LLDN was assessed using data from NASA's Lightning Imaging Sensor (LIS) onboard the Tropical Rainfall Measuring Mission (TRMM) satellite. Both DE and LA were evaluated using time-correlated LIS flashes with PacNet/LLDN data. Three years of PacNet/LLDN data were used to assess the performance (DE and LA) of PacNet/LLDN over the central Pacific (February 2004 - February 2007). Only days when at least three PacNet sensors (Unalaska, Lihue, Kona + LLDN) were up were included in the analysis. In addition, PacNet/LLDN data were filtered by removing multiple events.
The DE over the central Pacific was tested over two areas: near Hawaii (20-26N; 149-159W) and over the central-north region (28-38N; 150-160W) (Fig. 13). The total number of LIS and PacNet/LLDN flashes occurring over the grid cells were counted over the three-year period, February 2004 - February 2007. Both day and night DE were assessed. Day (night) data include all the flashes occurring between 9-15 (21-03) local time (LT) over each grid cell. The six-hour time windows centered at midnight and noon were selected to avoid terminator effects in the propagation path. Three different corrections were applied to LIS data to make the PacNet/LLDN and LIS flash rates comparable. (i) LIS data were DE-corrected using values of 0.73 for day and 0.93 for night, according to Boccippio et al. (2002), (ii) LIS view time is a function of latitude, thus the flash rates were normalized for view time over the selected areas, and (iii) LIS reports were corrected for an estimated IC:CG ratio, since LIS detects both intracloud (IC) and cloud-to-ground (CG) flashes, whereas the strikes detected by PacNet/LLDN are predominantly CG.
Since no high-quality lightning data are available over the central North Pacific, data from the Puerto Rico Electric Power Authority (PREPA) LLS, described in section 4, were used to estimate the IC:CG ratio. Although Puerto Rico is in a different basin than PacNet, PREPA provided suitable high-quality lightning data for determining the IC:CG ratio over the subtropical ocean. This analysis yielded an oceanic IC:CG ratio of 4.8, which was used to normalize the LIS flash rates for the PacNet/LLDN DE estimation over the Hawaii region. Previous studies have shown a weak correlation between IC:CG ratio and latitude, with IC:CG decreasing with increasing latitude (Pierce 1970; Prentice and Mackerras 1977; Mackerras et al. 1998;). Therefore, we used a IC:CG ratio of 4.0 over the central-north region (28-38N) to normalize the LIS flash rates. This value is consistent with the aforementioned studies.
Using the above approach, DE over the Hawaii region was calculated to be 22% during the day and 61% at night. DE over the central-north region varied between 19% during the day and 44% at night (Fig. 13)
It is suggested that the underestimate of the daytime DE is because of partial blockage of groundwaves by high terrain to the north and east of the Kona sensor. Slightly higher DE at night may simply be a reflection of the longer space constants that characterize the performance of the PacNet sensors in Hawaii.
Location accuracy (LA) is defined as the difference between the actual flash location and the location the LLS observes. The location accuracy of PacNet/LLDN was assessed using LIS data. LIS flash location is an optical centroid with nadir and limb resolutions of 4 and 6 km, respectively. Therefore, the results from the LA analysis need to be interpreted cautiously, considering the resolution of LIS data. The great-circle distances between all the PacNet/LLDN and LIS flashes occurring within ±1 ms time window were computed. The time stamp in the LIS flash data is not corrected for transmitting delay, resulting in 2 ms bias in the dataset (D. Boccippio 2007, personal communication). Therefore, PacNet/LLDN events were temporally matched with LIS flashes that occurred within a 1-3 ms lagged time window of LIS time stamp. The SMA and chi-values represent the quality of the location, and if there are multiple locations within 1 ms, the flash with the smallest value of SMA/sqrt(chi) is chosen to represent the flash location. As the number of matching pairs was relatively small, LA was averaged over relatively large grid boxes to obtain a reasonable sample size. All the boxes were located between 25-38N, with "east", "central", and "west" box boundaries of 140-155W, 155-165W, and 165-180W, respectively. The median observed location accuracies over the east, central, and west boxes were 13, 35, and 40 km, respectively (see Fig. 14). Although the data points are relatively evenly distributed over the boxes, the modeled LA does vary within each box, especially within the west box. Therefore, the median modeled LA over each box was computed by taking the median of the modeled LA at each of the locations of the lightning strikes inside each box. The LA model has 1.2 degree latitude x 2.0 degree longitude grid spacing. The median modeled location accuracies over the east, central, and west boxes were 12, 11, and 67 km, respectively.
Calibration of PacNet/LLDN includes the calculation of site error corrections. Site errors are systematic angle errors caused by scattering of the received signals in the vicinity of the sensors (e.g., Krider et al. 1976; Hiscox et al. 1984). The calibration process relies on redundant information in the form of additional lightning sensors or an independent measurement source. Given that (at the time the analysis) there were four PacNet sensors in the North Pacific and only two sensors in Hawaii (Lihue and Kona), existing site error corrections are challenging. Therefore, in the vicinity of Hawaii, lightning strikes near the baseline between the two Hawaii sensors may have large location errors when only these two sensors detect the discharge. By contrast, strikes away from the baseline can be accurately located, especially if additional sensors outside Hawaii participate in the detection. Strikes detected with more than two sensors are less sensitive to site errors due to the nature of the combined direction-finding and time-of-arrival methods (Cummins et al. 1998b). In practice, the favorable geometry afforded by the large number of U.S. and Canadian sensors helps to reduce the location errors over the eastern Pacific near the coast of North America.
Back to top